Manual calibration of ports for vehicle algorithms
The ifmVisionAssistant includes a new feature to calibrate the cameras based on the camera’s position and orientation.
Procedure:
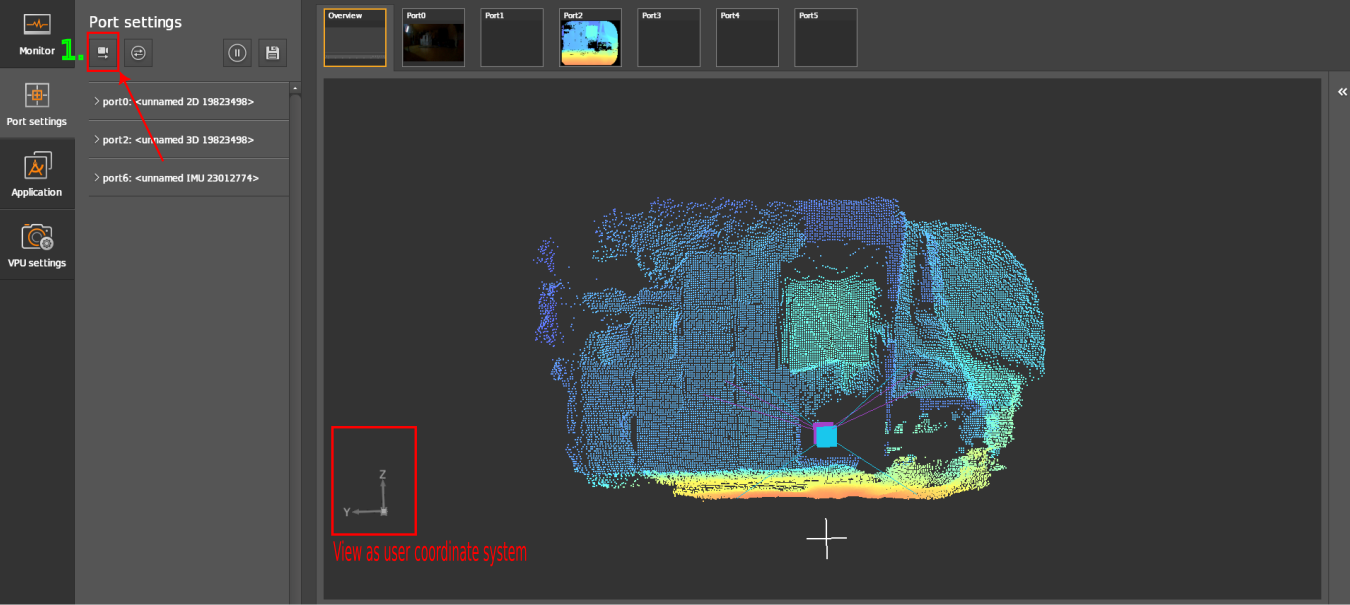
Click on
Manual calibration of ports for vehicle algorithmsunder thePort settingswindow.
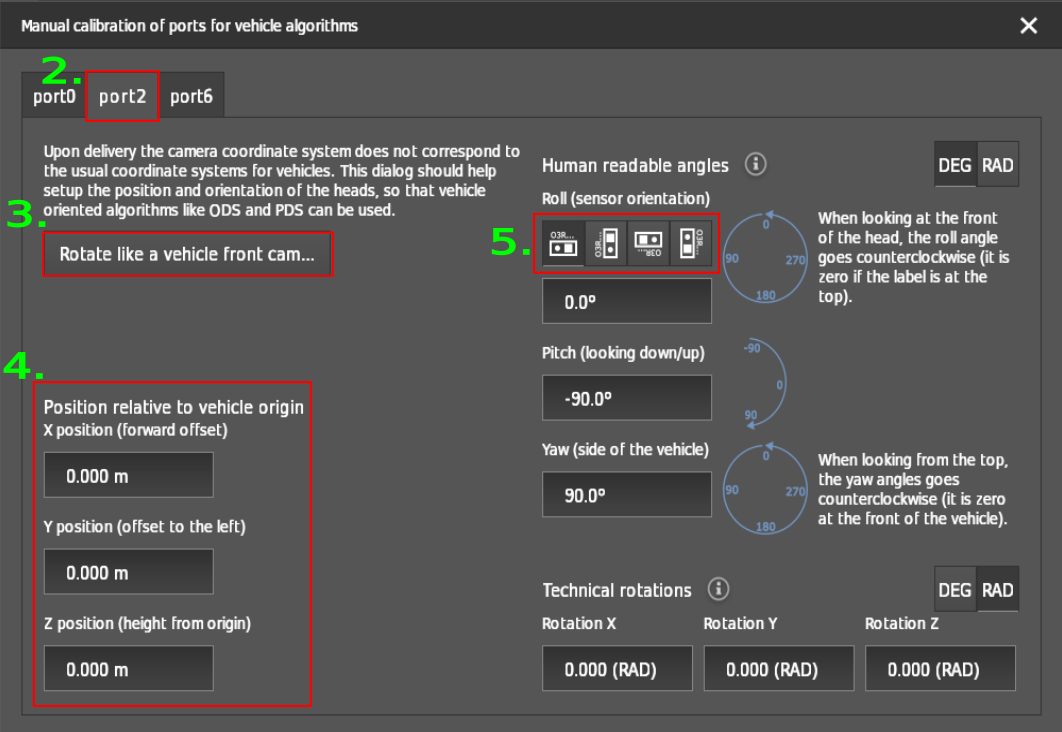
Select the port to calibrate
Click
Rotate like a vehicle front camerato calibrate.Enter the translation parameters, i.e. the translation distances from the user/robot coordinate system to the camera.
Select the orientation of the mounted camera when looking from the front of the camera.