Intrinsic calibration models
Every camera is individually calibrated in production. We use two different models depending on the field of view of the camera.
Fisheye model
This applies to the wide opening angle (O3R225) cameras. For these cameras, we use the fisheye distortion model as described below.
For unprojection: intrinsic calibration model
This model is used for converting pixel positions to 3D vectors. It corresponds to modelID=2. The following formulas show how to apply the model:
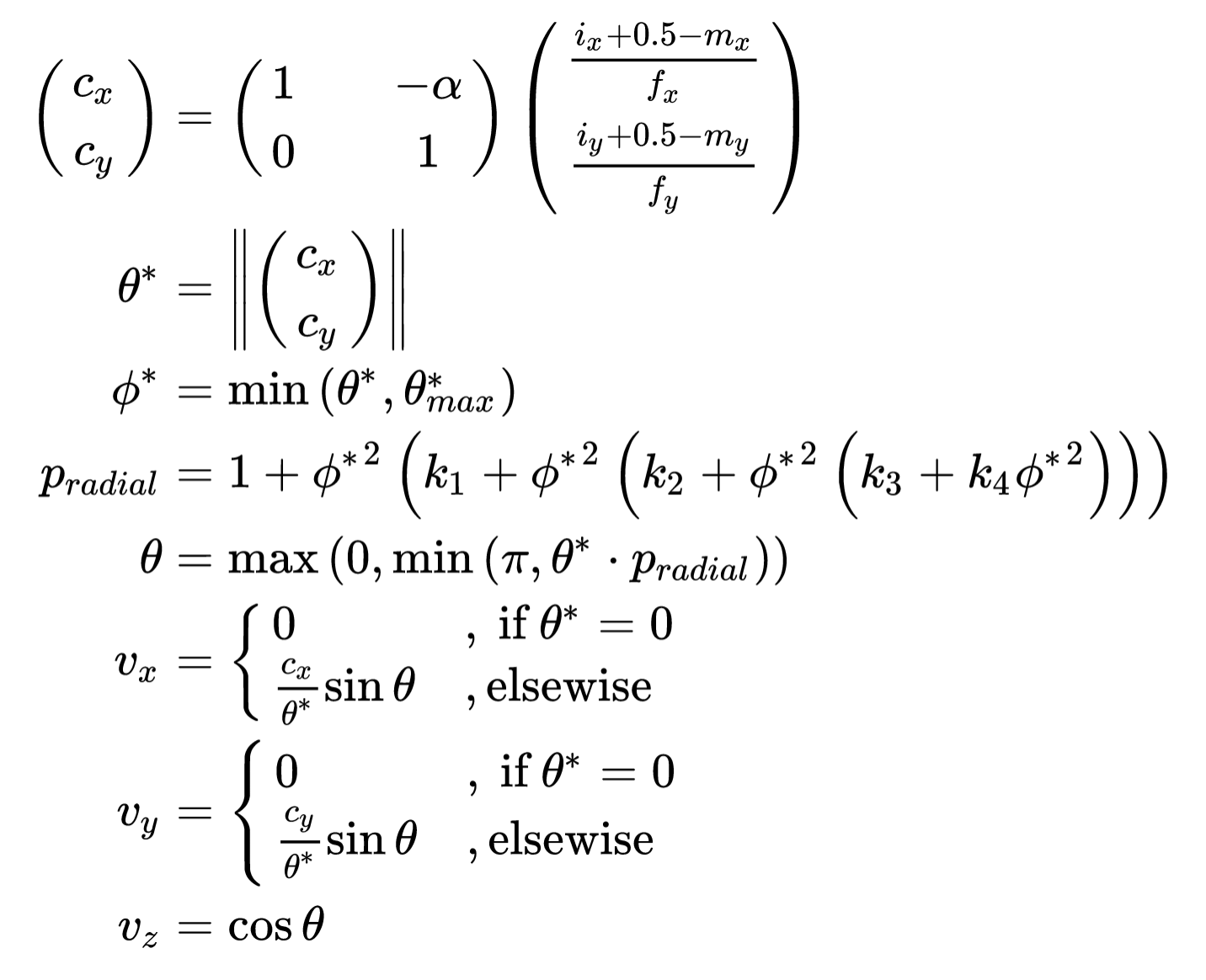
Where
 are the input coordinates as integer numbers, in pixels,
are the input coordinates as integer numbers, in pixels, is the resulting 3D direction vector in the optical coordinate system,
is the resulting 3D direction vector in the optical coordinate system, are the model parameters obtained from the
are the model parameters obtained from the modelParametersarray.
For projection: inverse intrinsic calibration model
This model is used for converting directions given as 3D vectors to pixel position. This corresponds to modelID=3. The following formulas show how to apply the model:
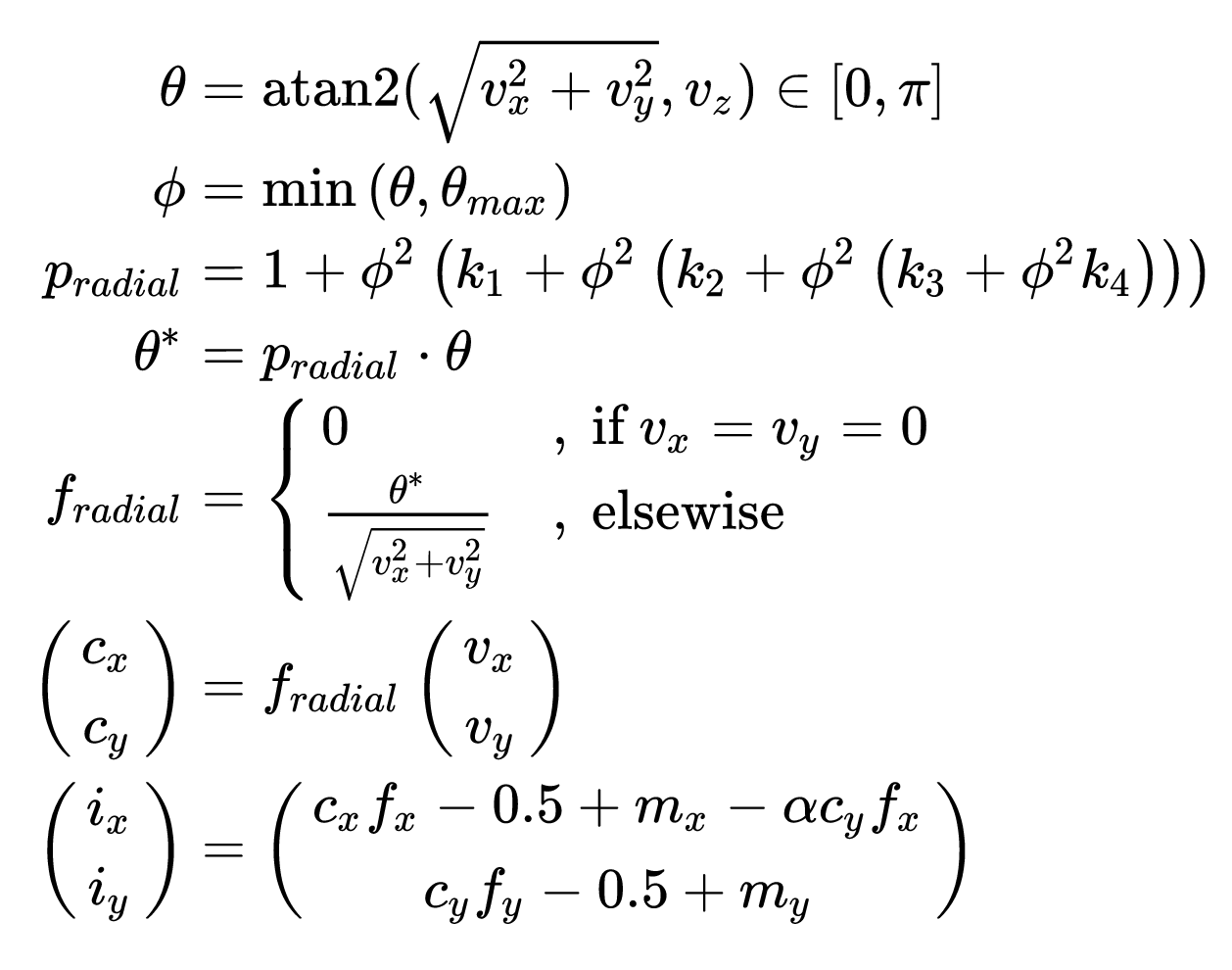
Where
- is the input direction vector in the optical coordinate system,
- are the resulting image coordinates (the upper left pixel has coordinates
 ),
),  are the model parameters obtained from the
are the model parameters obtained from the modelParametersarray.
Bouguet model
For unprojection: intrinsic calibration model
This model is used for converting pixel positions to 3D vectors. It corresponds to modelID=0. The following formulas show how to apply the model:
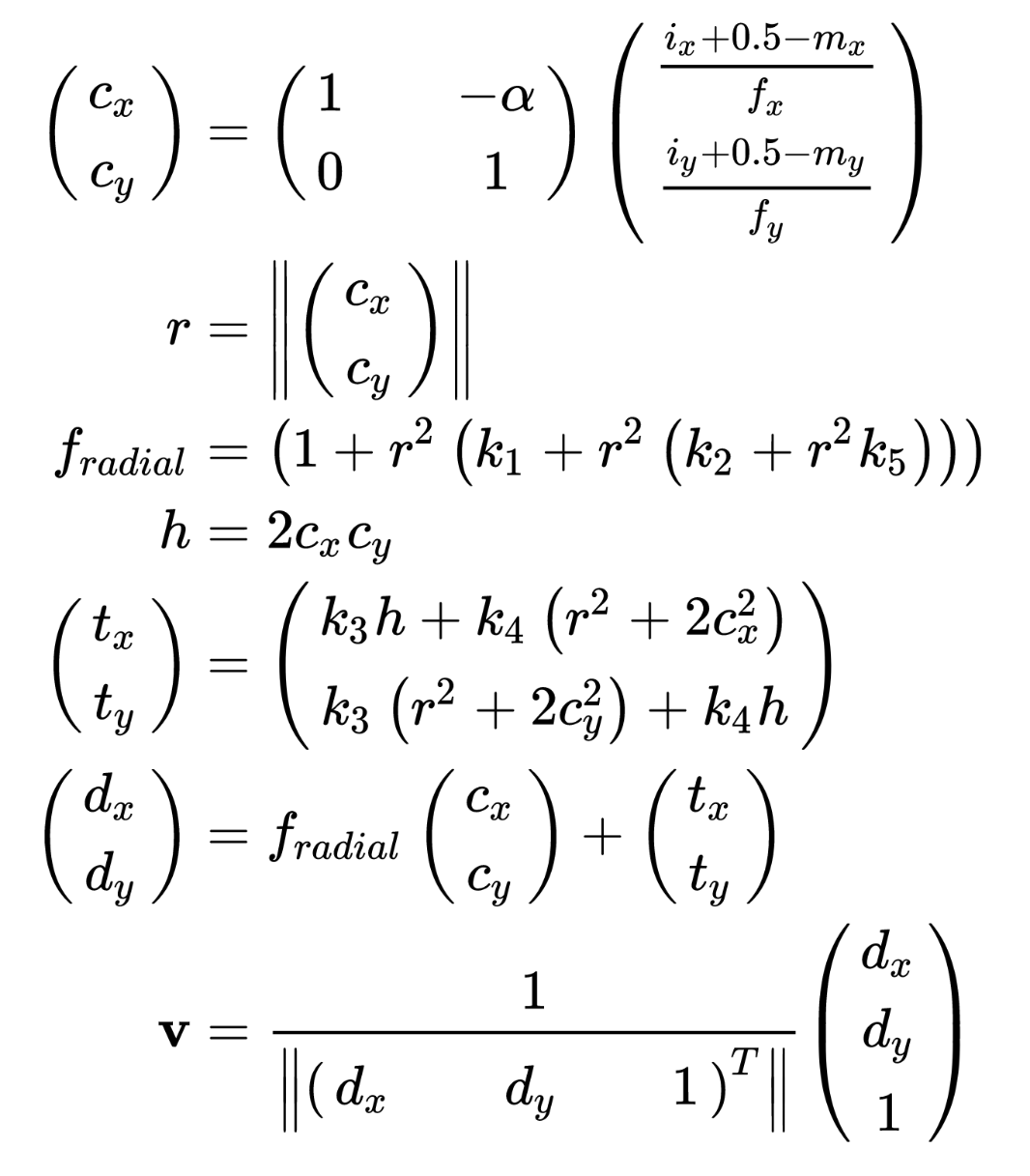
Where
- are the input coordinates are integer numbers, in pixels,
- is the resulting 3D direction vector in the optical coordinate system,
 are the model parameters obtained from the
are the model parameters obtained from the modelParametersarray.
For projection: inverse intrinsic calibration model
This model is used for converting directions given as 3D vectors to pixel position. This corresponds to modelID=1. The following formulas show how to apply the model:
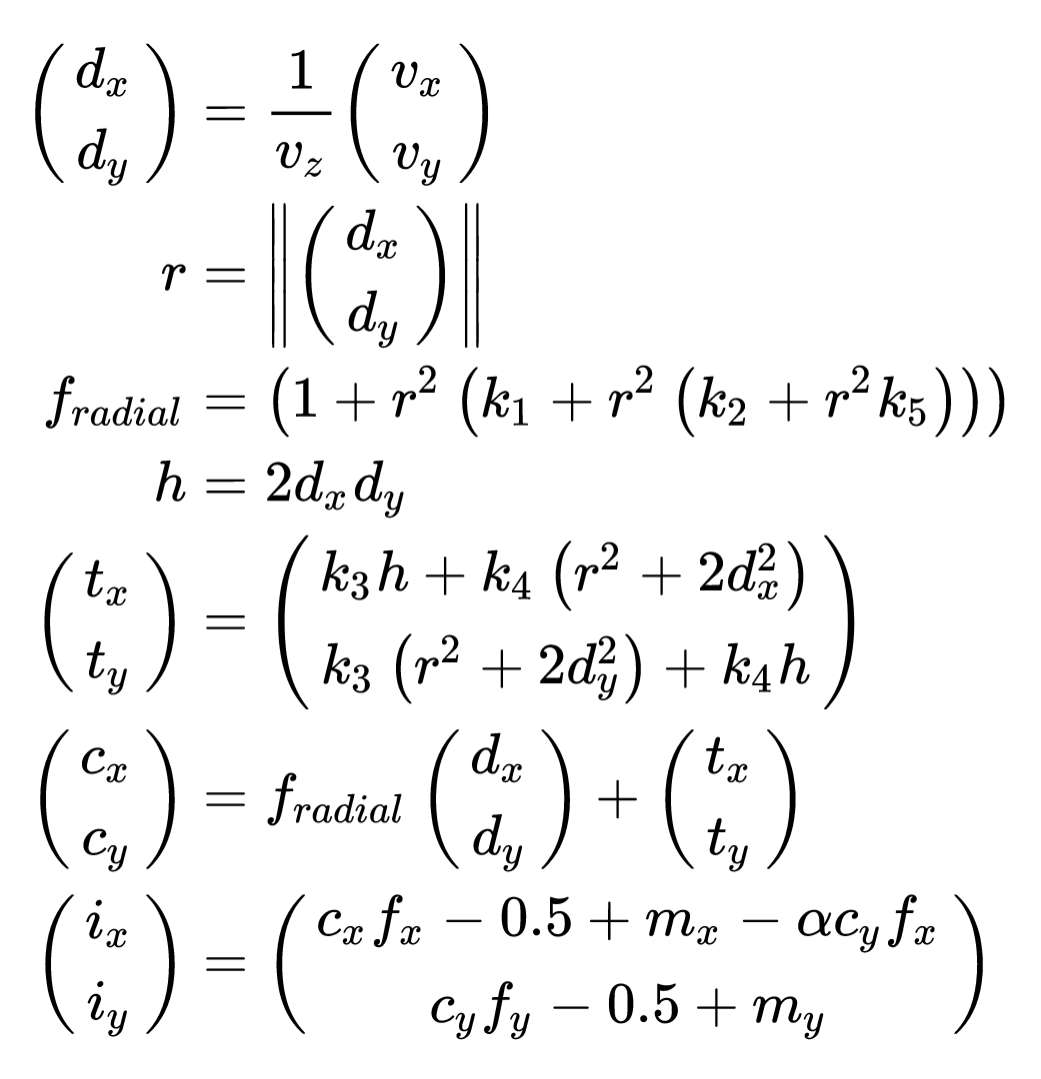
Where
- is the input direction vector in the optical coordinate system,
- are the resulting image coordinates (the upper left pixel has coordinates ),
- are the model parameters obtained from the
modelParametersarray.